
De acordo com as estatísticas da nova estratégia do Unmanned Driving Industry Institute, mais de 200 eventos de financiamento importantes foram divulgados na indústria de condução autônoma no país e no exterior em 2021, com um montante total de financiamento de quase 150 bilhões de yuans (incluindo IPO). Lá dentro, quase 70 eventos de financiamento e mais de 30 bilhões de yuans foram arrecadados por fornecedores de produtos e soluções não tripulados de baixa velocidade.
Nos últimos dois anos, surgiram cenários de entrega não tripulada, limpeza não tripulada e desembarque de armazenamento não tripulado, e a forte entrada de capital empurrou os veículos não tripulados para a “via rápida” do desenvolvimento. Com o desenvolvimento da tecnologia de fusão de sensores multimodo, representantes pioneiros ingressaram na equipe “profissional”, realizando diversas tarefas como limpeza de estradas, postagem e expresso, entrega de remessa, etc.

Veículos de limpeza não tripulados em funcionamento
Como um “futuro veículo vocacional” que substitui mão de obra, as soluções para evitar obstáculos aplicadas não devem ser desleixadas para vencer na indústria emergente, e o veículo deve ser capacitado de acordo com o cenário de trabalho, como o veículo não tripulado na indústria de saneamento deverá ter a função de identificação do estoque; com a função de evitar obstáculos com segurança na indústria de entrega; com a função de prevenção de risco de emergência na indústria de armazenamento......
- Indústria de saneamento: uma trindade de sensores inteligentesquimio

Indústria de saneamento – Trindade do esquema de detecção inteligente apresentado
O robô Candela Sunshine “mais limpo” dos Jogos Olímpicos de Inverno de Pequim, usa uma trindade de esquema de detecção inteligente, equipado com 19 radares ultrassônicos, permitindo que o robô tenha funções completas de prevenção de obstáculos, prevenção de transbordamento e anti-dumping
Arodada completaevitar obstáculos
A parte traseira está equipada com 2 radares ultrassônicos para monitoramento reverso e alerta de obstáculos, 3 radares ultrassônicos na frente e 6 radares ultrassônicos nas laterais para avanço total horizontal, vertical e oblíquo e funções de prevenção de obstáculos.
Prevenção de transbordamento
Instale um sensor na parte superior da área de carga do veículo para realizar a função de monitoramento da situação de carga e garantir que a capacidade de carga atenda aos padrões de segurança.
Antidumping
Evita que a secção dividida tombe devido a forças externas num estado sem carga ou subcarga, colocando em perigo a segurança pública.
- Setor de entrega:abrangenteevitação inteligente de obstáculosquimio
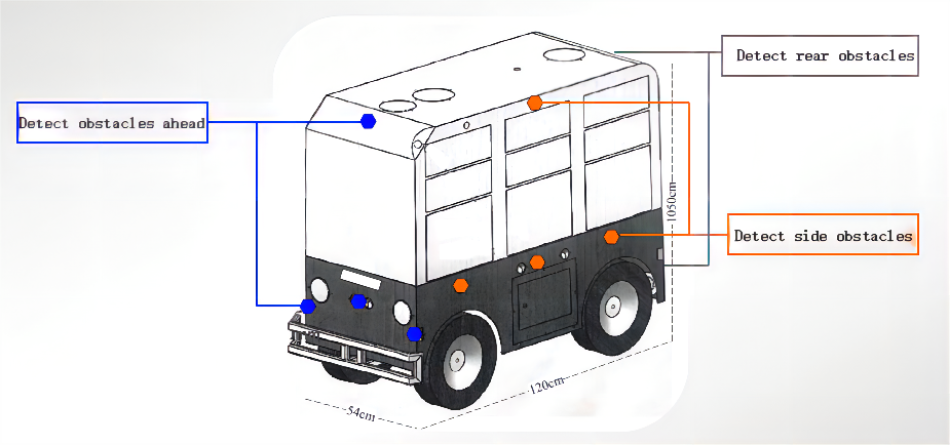
Indústria de entrega – demonstração parcial de um esquema abrangente e inteligente para evitar obstáculos
Em comparação com a logística de longo curso, o núcleo do cenário da indústria de entregas reside no curto curso e na alta frequência, o que significa que os veículos de entrega não tripulados devem ser concebidos para serem mais flexíveis e seguros para lidar com cenários urbanos complexos, como o transporte de edifícios. e evitar obstáculos em becos. A DYP forneceu um esquema abrangente e inteligente para evitar obstáculos à Zhixing Technology, tornando seu produto um veículo de entrega não tripulado para ser testado em um ambiente semiaberto na China.
Evitar obstáculos dianteiros e traseiros
Um radar ultrassônico é instalado na parte superior dianteira e traseira para detectar obstáculos mais altos, como postes de restrição de altura; três radares ultrassônicos são instalados na parte inferior dianteira e traseira para detectar obstáculos laterais baixos e frontais, como postes de restrição. Ao mesmo tempo, os radares ultrassônicos nas extremidades dianteira e traseira são capazes de proteger o veículo não tripulado para dar ré ou virar.
Evitar obstáculos laterais
Um radar ultrassônico é instalado acima de cada lado para detectar obstáculos laterais altos e auxiliar na ativação da função de entrega expressa; três radares ultrassônicos são instalados abaixo de cada lado para detectar obstáculos laterais baixos, como bordas de estradas, cinturões verdes e postes. Além disso, os radares ultrassônicos nos lados esquerdo e direito são capazes de encontrar a “vaga de estacionamento” certa para o veículo não tripulado e concluir o estacionamento automático com sucesso.
- Indústria de armazenamento: prevenção de emergências e otimização de rotaszaçãoquimio

Diagrama de prevenção de obstáculos AGV
Veículos não tripulados comuns em armazéns são posicionados para planejamento de caminhos locais por meio de soluções de tecnologia infravermelha e laser, mas ambos são afetados pela luz em termos de precisão, e podem ocorrer riscos de colisão quando vários carrinhos se cruzam em um armazém. Dianyingpu fornece soluções para evitar riscos de emergência e otimização de rotas para o setor de armazenamento que não são afetados pela luz, usando radar ultrassônico para ajudar o AGV do armazém a evitar obstáculos autônomos em armazéns, estacionamento oportuno e preciso em tempos de crise para evitar colisões.
Emergênciaevitação
Quando o radar ultrassônico detecta que um obstáculo entra na área de alerta, o sensor alimentará as informações de orientação do obstáculo mais próximo do carrinho não tripulado para o sistema de controle AGV a tempo, e o sistema de controle controlará o carrinho para desacelerar e frear. Para aqueles obstáculos que não estejam na área dianteira do carrinho, mesmo que estejam próximos, o radar não avisará para garantir a eficiência do funcionamento do carrinho.
Rota otimizadazação
O veículo não tripulado utiliza a nuvem de pontos laser combinada com o mapa de alta precisão para planejar o caminho local e obter uma série de trajetórias a serem selecionadas. Em seguida, as informações do obstáculo obtidas por ultrassom são projetadas e calculadas retroativamente para o sistema de coordenadas do veículo, as trajetórias obtidas a serem selecionadas são posteriormente filtradas e corrigidas, finalmente a trajetória ideal é derivada e o movimento para frente é baseado nesta trajetória.

- Capacidade de alcance de até 5m,ponto cego tão baixo quanto 3cm
- Estável, não afetado pela luz ecor da medida objeto
- Alta confiabilidade, conheça orequisitos de classe de veículo
Horário da postagem: 30 de agosto de 2022